
WebMaster : O.GRAS
Enseignant Sc. Physiques CPGE spé PSI
Création du site :1er juin 2020
Mise à jour : 13 sept 2025
Données diverses pour le TIPE 2023-2024
Liens de la page
Pour vos recherches de documents
1Salle des profs du lycée Thuillier: revue B.U.P.
2Salle des profs du lycée Thuillier: revue CHOCS
3C.D.I. du lycée Thuillier
4C.D.I. du lycée Branly
5Bibliothèque Municipale de la Ville d’Amiens
6Bibliothèque Universitaire (B.U.) de l’Université d’Amiens
ATTENTION : nous avons souvent des abonnements, donc notez les articles intéressants et demandez les nous
Pour commencer vos recherches :
Thèsesdiverses :
Les serveurs français
TEL (Thèses En Ligne), plate-forme d'auto-archivage hébergée sur HAL (Hyper Article en Ligne) permet de rechercher les thèses françaises en ligne déposées sur le serveur. La recherche peut être effectuée par établissement, par laboratoire de recherche, par discipline, par auteur, titre, sujet, date de soutenance, etc. On peut trouver sur TEL plusieurs versions d'une thèse (version originelle, version corrigée, version non validée), ainsi que la présentation d'une soutenance.
Les thèses déposées sur TEL sont également accessibles à partir d'OAIster.
Le moteur de recherche Theses.fr est le point d'accès aux thèses françaises (en préparation, soutenues) sous différents supports (en ligne, sur microfiches, sur papier)
Les serveurs disciplinaires
L'intérêt d'un serveur disciplinaire commun à plusieurs établissements, comme PASTEL (PAris-tech Service de Thèses En Ligne) est de cibler une recherche de thèses uniquement sur un réseau donné, en l'occurrence le réseau des grandes écoles d'ingénieurs parisiennes.
Vous trouverez une liste de serveurs disciplinaires dans l'onglet "Ressources et outils" de ce guide.
Liens documentaires
PENSEZ A ME SIGNALER LES LIENS «MORTS» OU INACTIFS
Afin de parfaire votre culture scientifique, afin de rester en éveil face à l’actualité des sciences, prenez un peu de votre temps pour parcourir ces quelques pages sur la Toile:
•Société Française de Physique
•Union des Physiciens et Chimistes
•Société Astronomique de France
•La Revue Techniques de l’Ingénieur
•Site sur l’Espace
•LISTE NOIRE DES SITES DE SCIENCE
•Le système solaire à portée de souris
•Un grand site de vulgarisation scientifique
•Le site de mon club d’astronomie
•La Cité des Sciences et de l’Industrie de Paris et Palais de la découverte
•Le musée des Sciences de Londres
•Le musée des sciences de Munich
•Encyclopédie Libre et Gratuite (en développement)
•Liste des articles de Physique du lien précédent
Pour obtenir des logiciels gratuits (légaux):Framasoft
<scriptsrc="http://www.framasoft.net/distrib.php3?lang=fr"></script> Actualité-Nouveautés:actualité scientifique
Pour une aide sous Linux: Léa Linux
DIVERS
Sites généralistes: CEA: lien
Simulations de propriétés physiques: http://hypo.geneve.ch/www/physic/simulation/indexapplets.html
Visualisations de phénomènes physiques: http://www.infoline.ru/g23/5495/
Astrophysique générale: http://www.medoc-ias.u-psud.fr
Matière condensée: http://www.lps.u-psud.fr/
Supras, liquides de spin, fullerènes: http://www.lps.u-psud.fr/Collectif/gr_04/
Simulations de cavité laser: http://hypo.geneve.ch/www/physic/simulations/optique/laser.html
Astrophysique générale: http://www.almaden.ibm.com/vis/stm/images/stm15.jpg
Noyaux: IN2P3: http://voyage.in2p3.fr
Centre Européen de Recherche Nucléaire: http://www.cern.ch
Sur les plasmas et la fusion thermonucléaire http://www-fusion-magnetique.cea.fr
Sur les plasma spatiaux et l’astrophysique: http://www.lesia.obspm.fr/Didactique/Didactique.html
CEMAGREF
(Centre National du Machinisme Agricole, du Génie Rural, des Eaux et des Forêts)
CIRAD
(Centre de Coopération International en Recherche Agronomique pour le Développement)
INSERM
(Institut National de la Santé et de la Recherche Médicale)
Institut Curie
Institut Pasteur
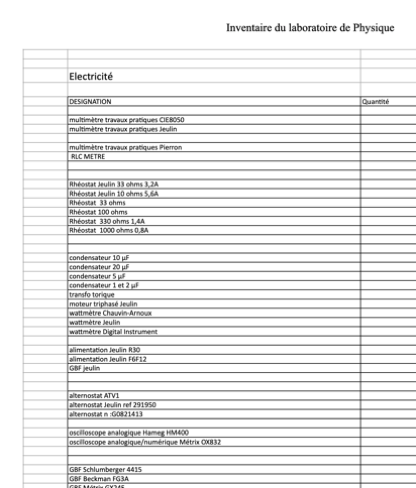
Inventaire du laboratoire
Exemples de sujets de TIPE 2023-2024
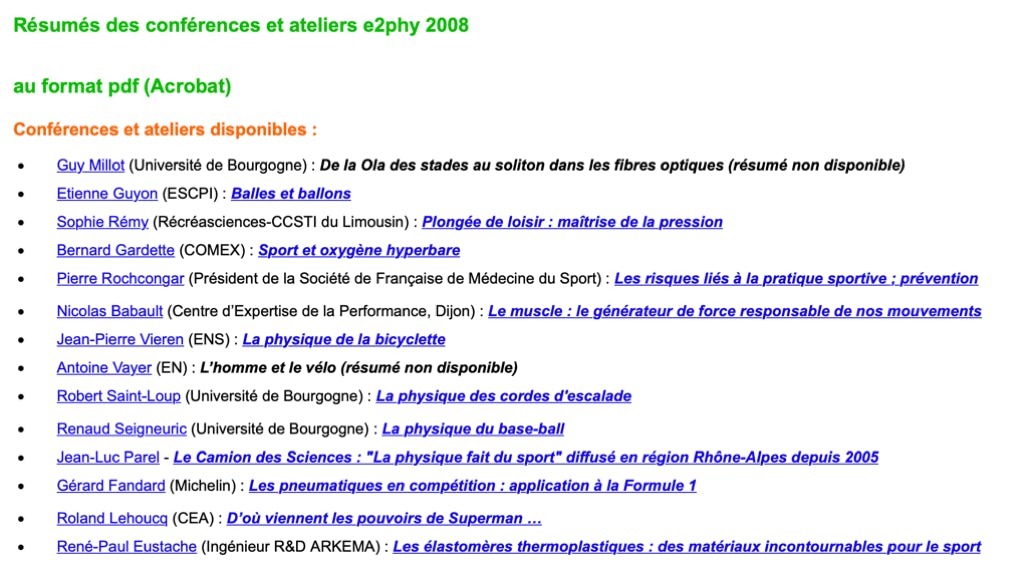
Thème de T.I.P.E "Jeux - Sport"
Exemples :
- jeux régionaux : en bois (quilles, ...) ou archerie ou autre
- intelligence et adversaire électronique : jeu d'échecs contre un ordinateur, bot avec les jeux vidéo en PFS, ...
- jeux vidéos : images 3D, création d'interactions physiques avec PyGame, Unity ou Blender
- jeux et maquettes : bateaux, avions, voitures
- optimisation de trajet : robots, foules, au sens de la protection ou de la sécurité, sorties de secours, régulation de trafic et de déplacement, ...
- sport, organisation et infrastructures : stades, déplacement de foules, aménagements, parc olympique, billetterie, villages olympiques, constructions, acoustique des salles et en dehors des salles, déplacement du public, sécurité, surveillance, drones, arbitrage humain ou vidéo, traitement de l'information vidéo (place des joueurs, localisation de la balle, arbitrage assisté, ...), pelouse et sa pousse ou sa restauration, sécurité incendie, simulation informatique du comportement des foules et de son déplacement, vidéos, retransmission, télévision, radio, médias internet, …, évacuation d’un stade et hydrodynamique des foules, marathon et mécanique des fluides, …
- jeu/sport : billard, pétanque, avions en papier, frisbee, ...
- sport et performances : limites humaines et mécaniques, dopage, matériaux, entrainement assisté par vidéo ou reconnaissance de formes ou IA, ...
- aéronautique/techniques : voltige aérienne, avions et technique de vol, planeurs et portée, wingsuits et vol,
- aéronautique/instruments : suivi d'un vol, entraînement, préparation de compétitions, améliorations et sécurité, utilisation de la réalité augmentée, ...
- nautisme : courses en bateau à voile ou à moteur, catamaran, guidage radar ou satellite, suivi inertiel des bateaux, rôle des foils, rôle des spinnakers, ...
- cas des ballons et balles : sport/jeu football, handball, tennis de table, golf, bowling, tennis, squash, badmington et volants avec impact sur la taille du terrain, rôles des huiles et résines, effet Magnus, portée, effets donnés à la balle, crise de traînée, ... déformation des raquettes ou battes,, résonante, déformation des balles et allons, coefficients de restitution ,…
- sports automobiles : moteurs, draggsters, roues, adhérence, sécurité, vidéos, mesures de vitesses, chronométrage, autonomie, stabilité inertielle des motos, motos et comportement routier sur pistes avec pluie, ...
- archerie : puissance d'un arc, visée, portée, rôle de l'empennage, répétition du geste et aide vidéo et informatique, ...
- tir sportif : sécurité et empoisonnement au plomb, visée, recul, poudres, cibles, apparition récente des pistolets et fusils à visée laser et cibles de détection, bruit, casques anti-bruit, ... lunettes d’étude de la position des yeux et de la direction du regard …
- athlétisme/gymnastique : vidéo, mesures de distances et/ou de vitesse, arbitrage,, reconnaissance de mouvement, avatar et réalité augmentée …
- sports de combat : impact, mouvement, enregistrements vidéos et avatars, tapis, échos des salles, projections, chutes, robot d'entraînement, ...
- sport et hiver : ski, saut à ski, ski de fond, ski de randonnée, raquette, patinage, … et matériel associé
- sport et glisse : ski nautique, jet ski, place à voile, paddle, hydroglisseur, airboat, … et matériel associé
- sport et boules creuses ou pleines : pétanque ou boules lyonnaises
- sports urbains et glisse urbaine …
Liens Sport JO 2024: https://sciences2024.polytechnique.frou http://www.ens-lyon.fr/actualite/recherche/sciences-2024ouhttps://ecoledesponts.fr/sites/ecoledesponts.fr/files/documents/dp_sciences_2024.pdfou https://sciences2024.polytechnique.fr/these ou …
Matériel disponible (lycée ou club ou personnel) :
- cartes d’acquisition diverses, capteurs (voir inventaire PDF)
- robots : roulants et volants (drones DJI Tello programmables en Python) + 1 drone nautique (bateau + drone + foils)
- soufflerie DIY
- aquarium et bouteilles de plongée
- imprimante 3D
etc…
Plus ce que l’on fabriquera…
Logiciels : Python, BLENDER, Pygame, Processsing, C++, SolidWorks, …

Carte contrôleur Arduino UNO, Due, Nano, Mega … et clones
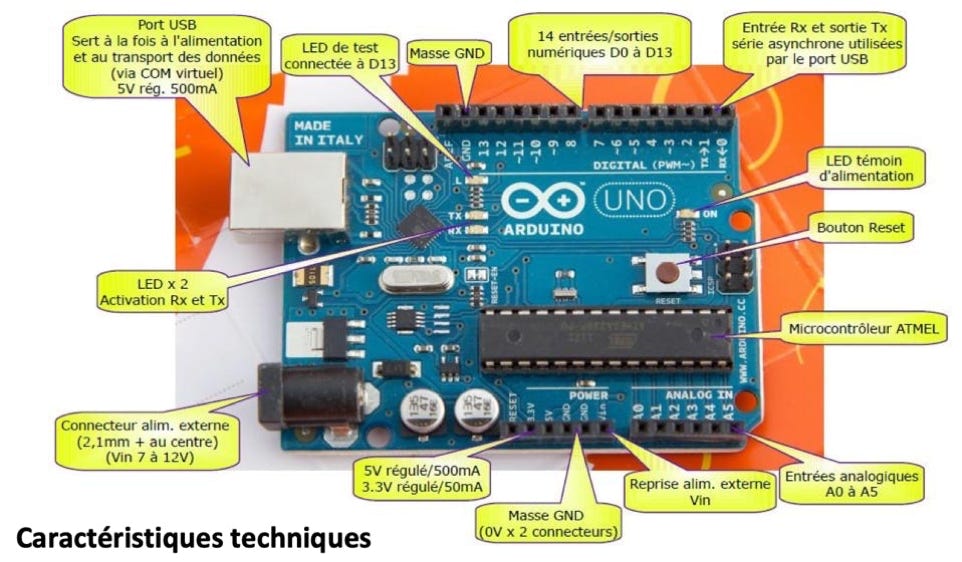
Avantage énorme : des exemples très faciles à trouver sur l’Internet, à copier et à modifier pour adapter à son usage.
Autre avantage : système déjà installé, rien à flasher pour changer de noyau. Utilisable en TP très rapidement.
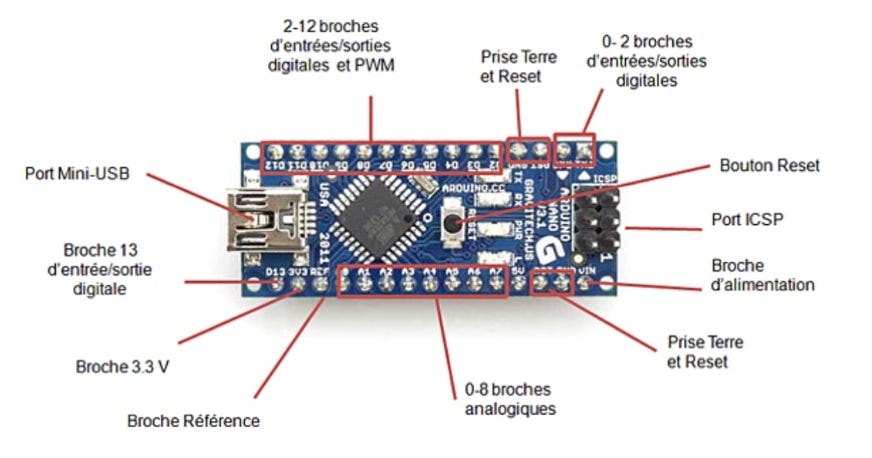
NANO : très petit, avec un peu moins de connexions
MEGA : plus d’entrées/sorties
DUE : processeur plus puissant, CAN 12 bits 4096 valeurs
Négatif : la mémoire et le peu de fréquences pour le PWM
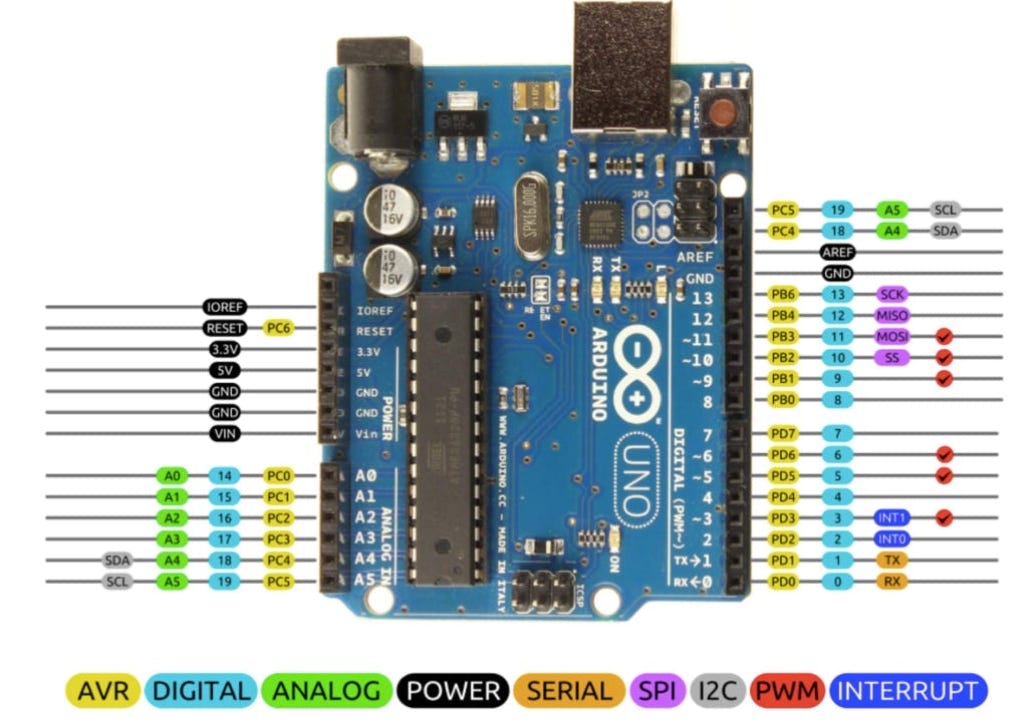
Caractéristiques
entrées-sorties numériquesmax 5V: 14
entrées analogiques (jusqu’à 5V) avec CAN 10 bits : 6
(Donc 1024 valeurs entre 0 et 5V ou entre 0 et U la tension imposée sur la borne AREF)
sorties analogiques : 0
PWM: sur 6 sorties numériques. Cela permet de simuler des sorties réglables en tension entre 0 et 5V.
Communications
port série USB : communications avec un ordinateur
bus série avec les bornes RX-TX : 1
bus I2C : 1(c’est un bus série synchrone bidirectionnel half-duplex, où plusieurs équipements, maîtres ou esclaves, peuvent être connectés au bus, connexion deux fils SDA et SCL)
SPI : 1
Bornes pour interruptions : 2
Micro-contrôleur ATMega:16 MHz
Langage de programmation :C++ en indépendant, mais interaction possible avec un programme Python sur un ordinateur et échangeant par port série.
Logiciel :IDE Arduino
Mémoire : flash pour programme = 32 Ko
SRAM pour variables = 2 Ko c’est peu !
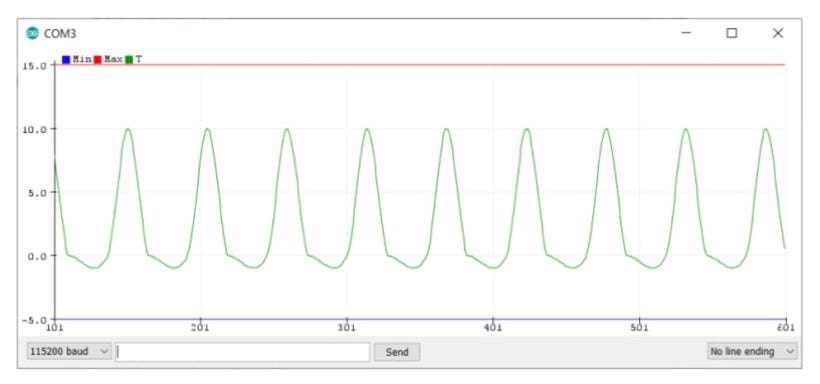
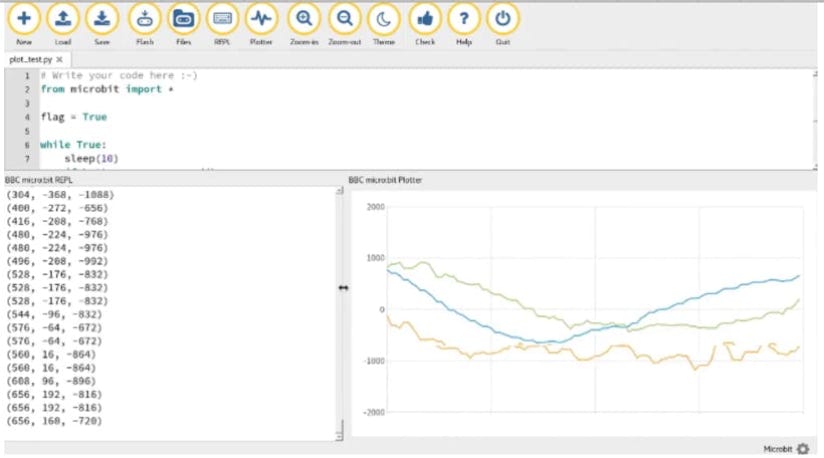
Tracé de données acquises par le port série en temps réelsur l’ordinateur
Nano : format mini
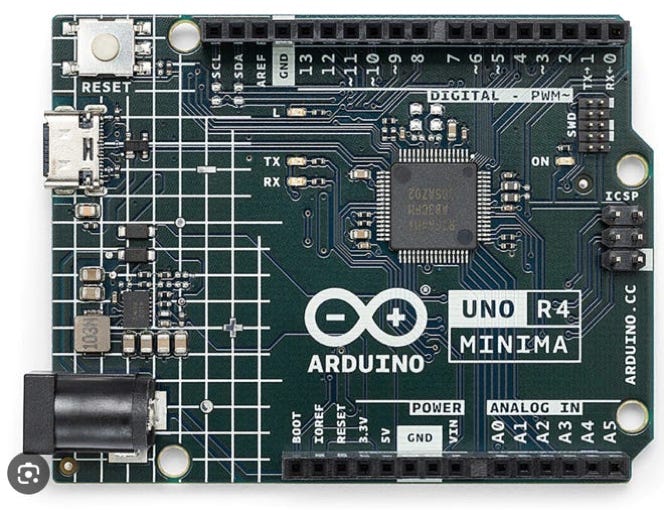
Evolutions:par exemplel'Arduino UNO R4
Que peut-on attendre de l'Arduino UNO R4 ?
Eh bien, son nom semble être la seule chose sur l'UNO qui reste inchangée sur l'UNO. Alors que le R3 est basé sur l'ATmega328 8 bits de Microchip, le R4 est équipé d'un ARM Cortex-M4 32 bits RA4M1 de Renesas fonctionnant à 48 MHz au lieu de 16 MHz. Il dispose de 32 Ko de RAM, soit seize fois plus que le R3, et de 256 Ko de mémoire flash, soit huit fois plus que le R3. L'énorme connecteur USB-B du R3 a été remplacé par un port USB-C moderne. La tension d'entrée maximale est passée à 24 V, comme sur le nouveau GIGA R1. Le R4 dispose également d'un bus CAN et d'un port SPI supplémentaire.
Enfin, il y a une vraie sortie analogique puisque le RA4M1 intègre un convertisseur numérique-analogique (CNA ou DAC) de 12 bits.
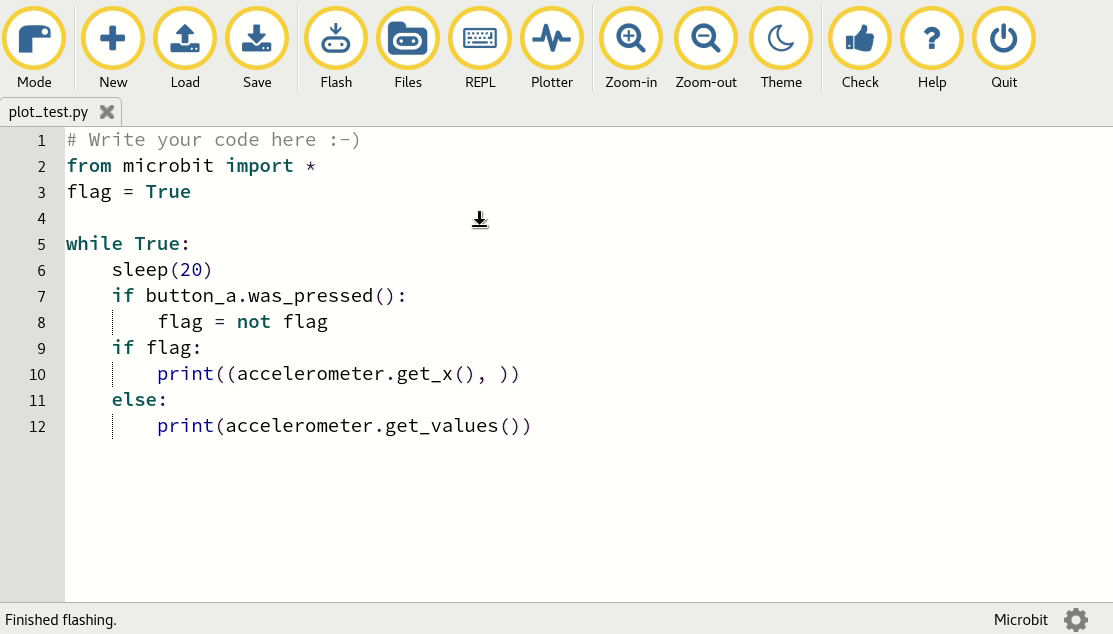
Carte contrôleur BBC Micro:bit
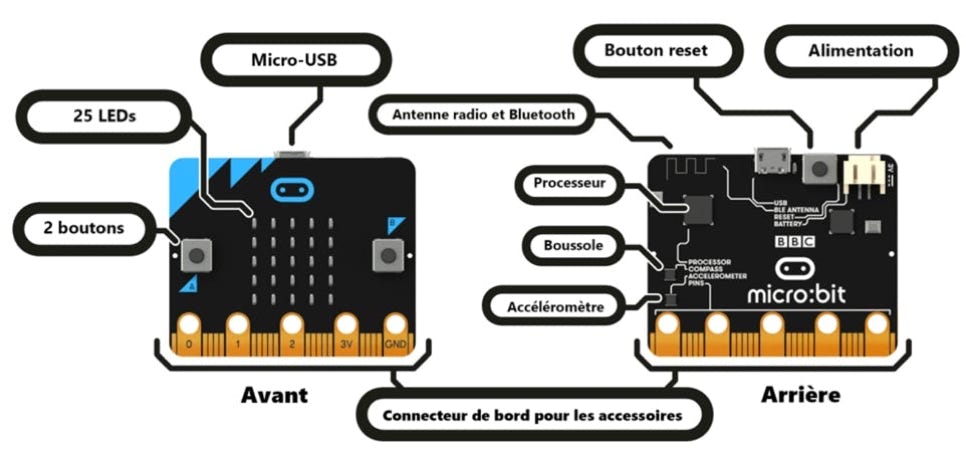
Avantage de programmation : programmation en Micro-Python.
Attention : c’est une version simplifiée de Python 3, donc il ne faut pas penser utiliser les bibliothèques élaborées comme NumPy ou PIL
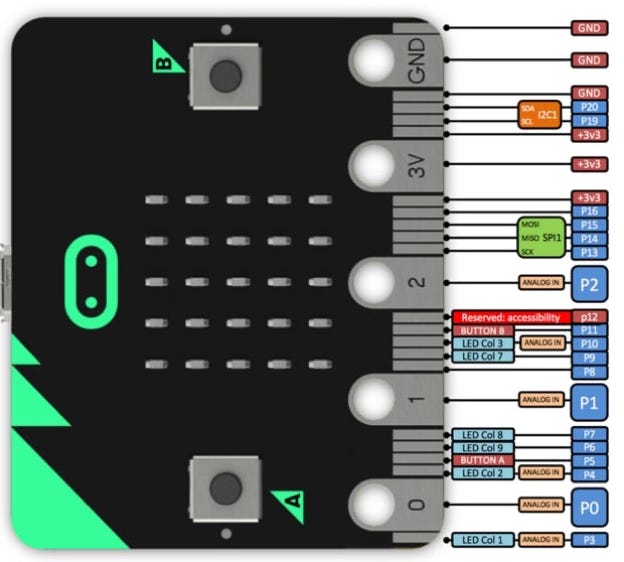
Interface à prévoir pour connecter
aux BreadBoard classiques
AVANTAGE : boussole,
accéléromètre, Radio, BlueTooth,
afficheur LED 5x5déjà présent sur la carte

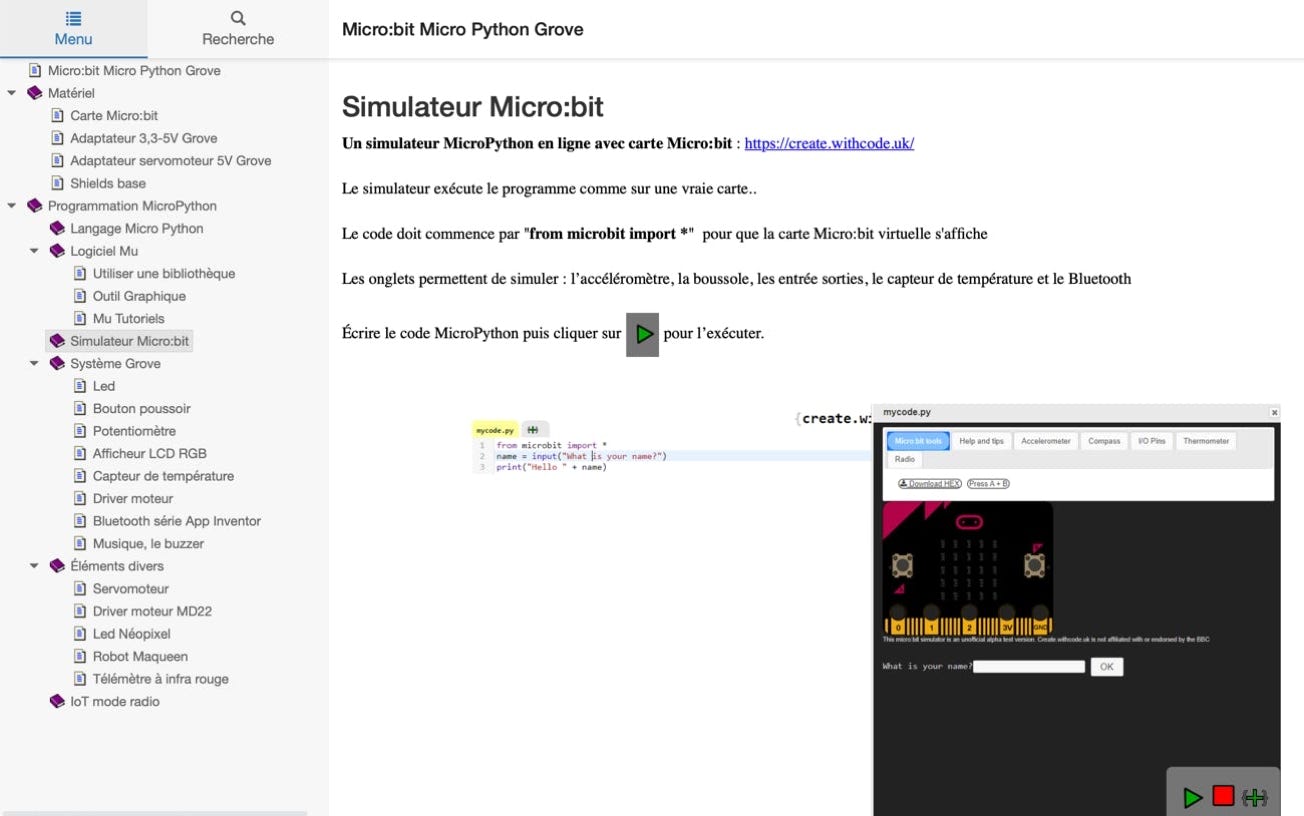
EMULATEUR :
Caractéristiques : ATTENTION entrée max 3,3V !!!!!!
entrées-sorties numériques :16 GPIO
entrées analogiques (jusqu’à 5V) avec CAN 12 bits :6
sortie analogique : 0
PWM: sur 16 sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
256 Ko de flash + RAM 16 Ko (attention, faible)
Communications
port série USB,comm radio entre cartes Micro:bit facile,
bus série avec les bornes RX-TX :0!!!
bus I2C et SPI :1
Micro-contrôleurARM Cortex M0:16 MHz
Langage de programmation :micro-Python
Logiciel :Thonny ou MuEditor
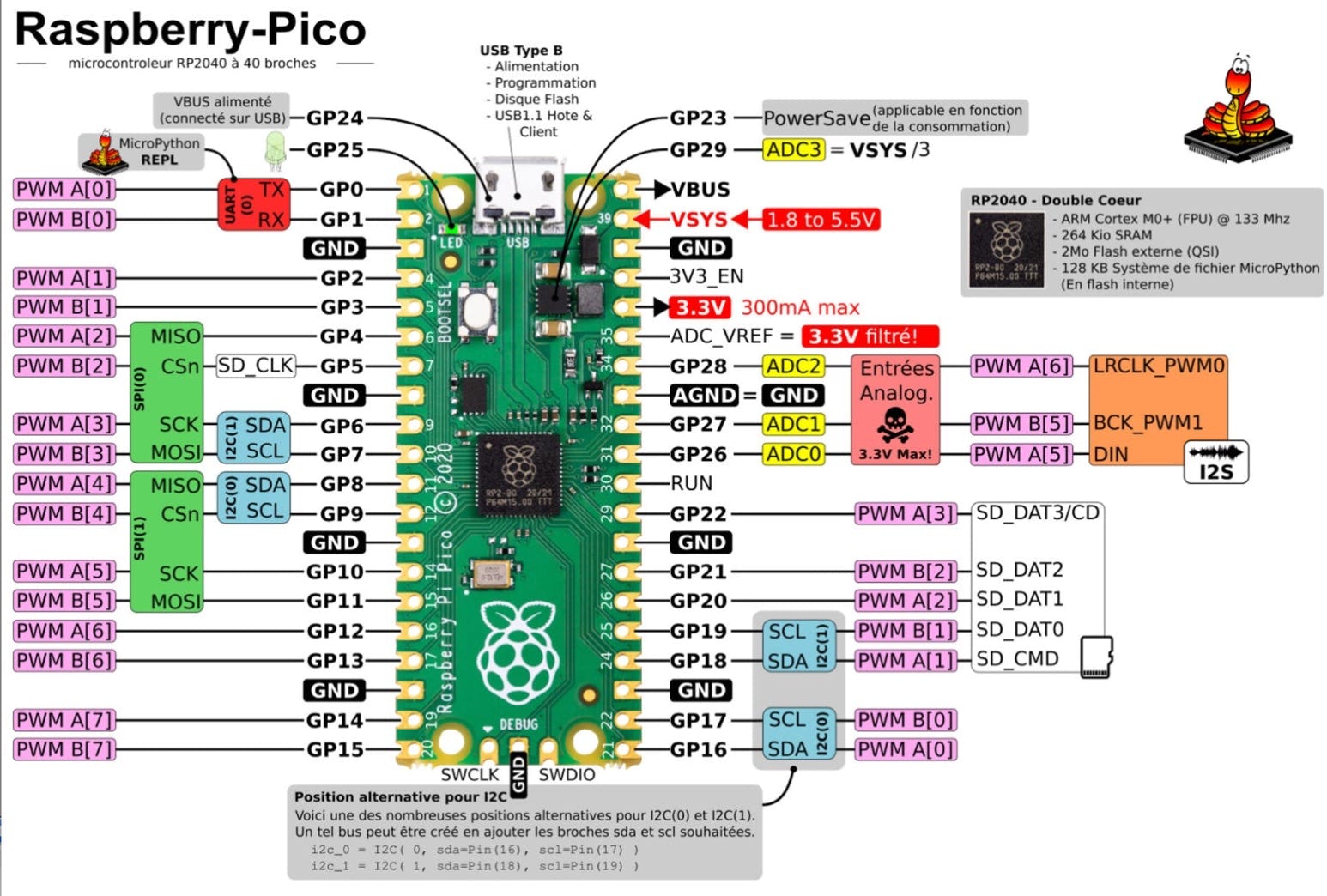
Carte contrôleur Raspberry Pi Pico
Tracé de données acquises par le port série en temps réelsur l’ordinateur
Avantage de programmation : programmation en Micro-Python.
Attention : c’est une version simplifiée de Python 3, donc il ne faut pas penser utiliser les bibliothèques élaborées comme NumPy ou PIL
Egalement, le langage est interprété donc plus lent. Mais processeur plus rapide.
Caractéristiques :ATTENTION entrée max 3,3V !!!!!!
entrées-sorties numériques :29 GPIO
entrées analogiques (jusqu’à 5V) avec CAN 12 bits :4
sortie analogique : 0
PWM: sur 8 sorties numériques au moins. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
Communications :
port série USB,
bus série avec les bornes RX-TX :1
bus I2C et SPI :4 + 2
Micro-contrôleurARM M0 DualCore à 133 MHz
264 Ko SRAM+ 2 Mo Flash+ 128 Ko fichiers
Langage de programmation :Micro-Python ou C++
Logiciel :MuEditor, Thonny
Nano ordinateur Raspberry Pi + système d’exploitation
AVANTAGE : caméra dédiée optionnelle
Avec les bibliothèques PIL, on fait du
Traitement d’image facilement, ainsi que de la reconnaissance de forme ou de visage.
Avantage de programmation : programmation en Python .
Donc accès à toutes les bibliothèques classiques
Ports USB, donc avec un clavier et une souris, on a un nano-ordinateur
MAIS :
1) système d’exploitation à installer sur carte SD ou disque SSD donc temps de démarrage
2) du fait du multi-tache, les mesures ne peuvent être en «temps-réel»
3) pas d’entrées analogiques, ce qui oblige à utiliser un composant ADC ou un Arduino ou Pico ou autre
CONNEXIONS ci-dessous:
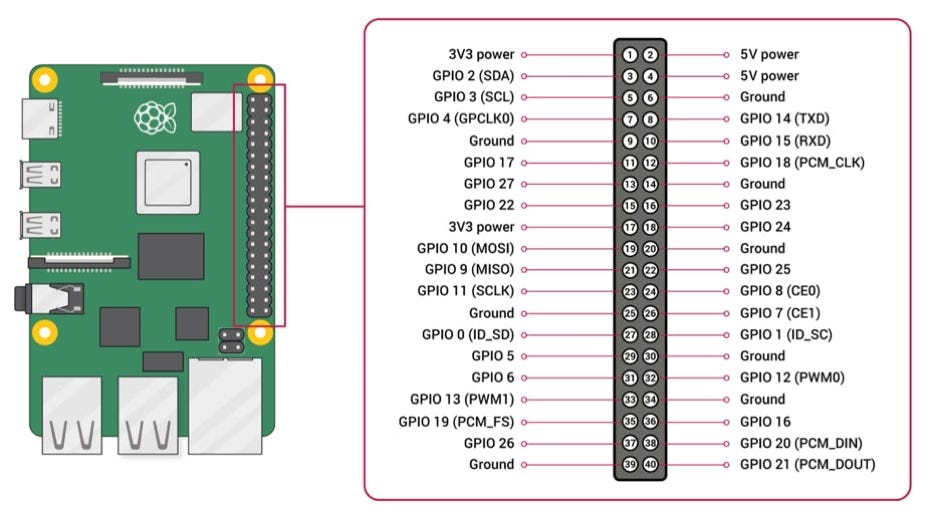

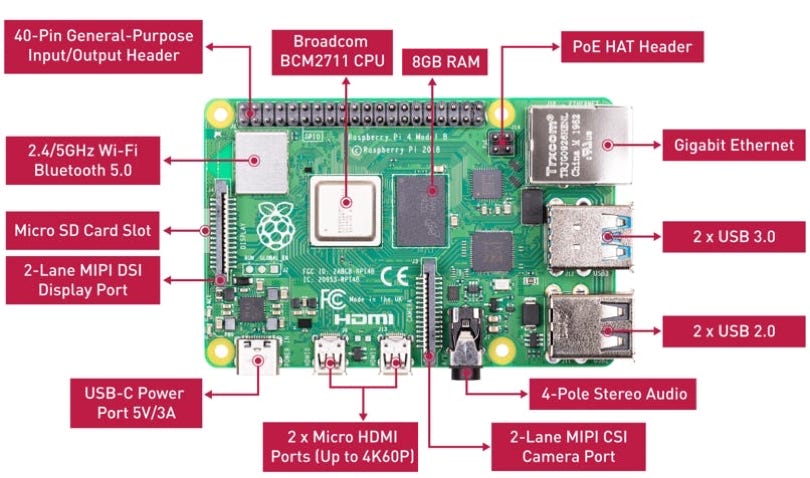
Caractéristiques :
entrées-sorties numériques :24 GPIO
entrées analogiques: 0 donc il faut ajouter un CAN externe
sortie analogique : 0
PWM: sur 8 sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
Communications :
port série USB,
bus série avec les bornes RX-TX :1
bus I2C et SPI :1 + 2
Processeurde différents types selon le modèle 1, 2, 3 ou 4
2, 4 ou 8 Mo de RAM
(ARM v8) quad-core 64-bit SoC @ 1.5GHz pour le modèle 4
Langage de programmation :ce que l’on veut, Fortran, Pascal, Python, C++, Java, etc.
Système d’exploitation :version spécifique de Linux le plus souvent, RasbianOS etc.
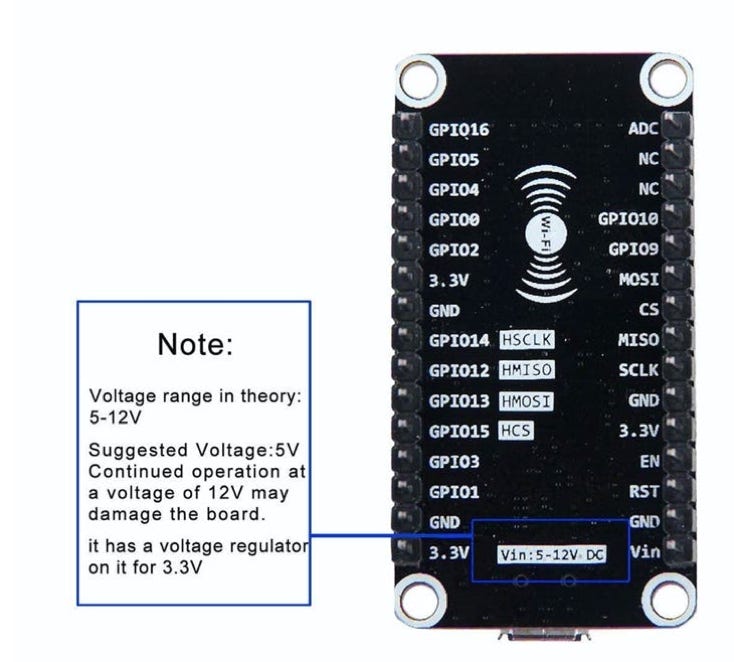
Carte Contrôleur ESP 32 ou 8266
Le composant ESP 8266 est une carte avec Wifi qui permet de communiquer sans fil. Ce composant, facile à programmer et bon marché (5 euros), possède un microprocesseur 32 bits.
WIFI+BlueTooth
Caractéristiques
entrées-sorties numériques : 10
entrées analogiques (jusqu’à 5V) avec CAN 12 bits :18
sorties analogiques : 2 en 8 bits
PWM: sur N sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.

Communications :
port série USB,
bus série avec les bornes RX-TX :3
bus I2C et SPI :2 + 4
+ 1 capteur à effet Hall
Micro-contrôleur 32bits:160 ou 240 MHz
512 Ko SRAM
Langage de programmation :Micro-python
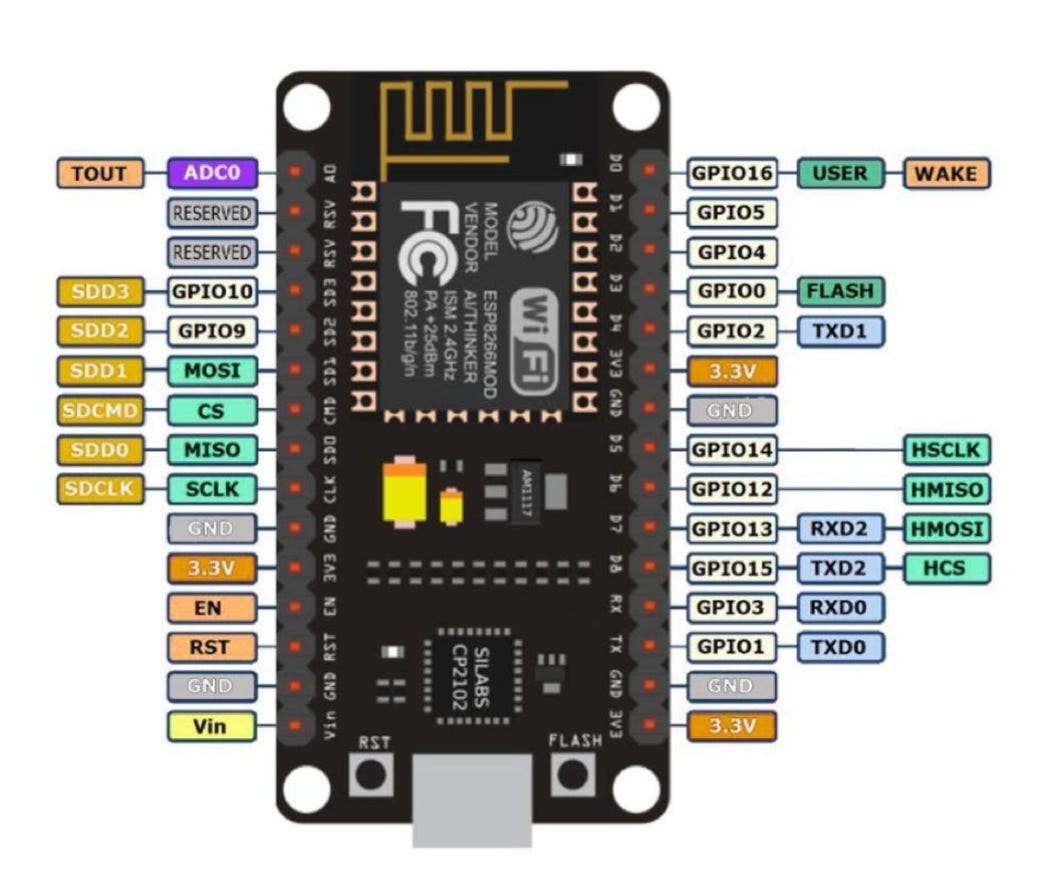
Avantage de programmation : programmation en Micro-Python.
Attention : c’est une version simplifiée de Python 3, donc il ne faut pas penser utiliser les bibliothèques élaborées comme NumPy ou PIL
Egalement, le langage est interprété donc plus lent.
CONNEXIONS ci-dessous:
Logiciel :
Carte Contrôleur MaixDuino
Format similaire à la carte Arduino pour les deux rangées de connecteurs
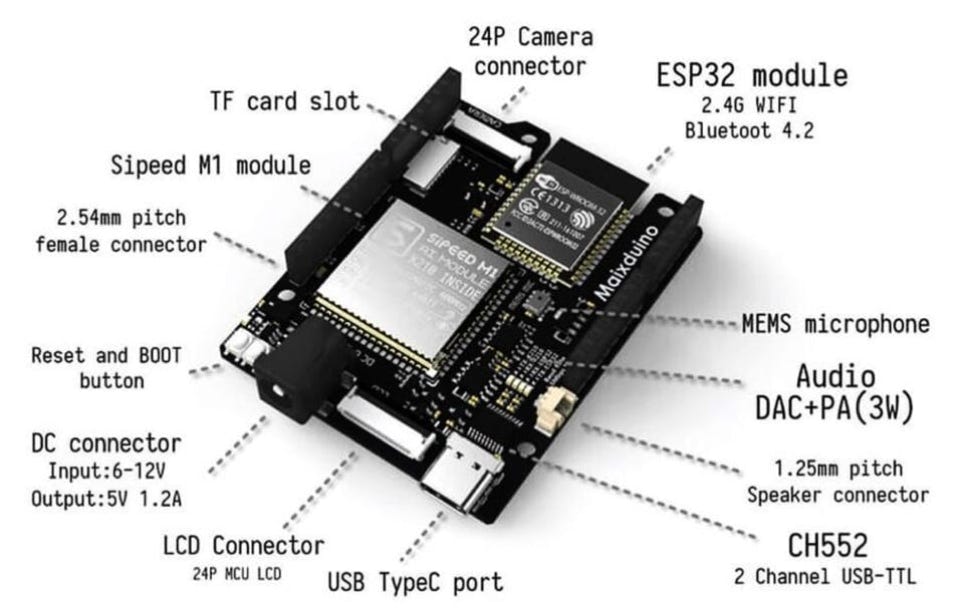
KIT avec écran et caméra
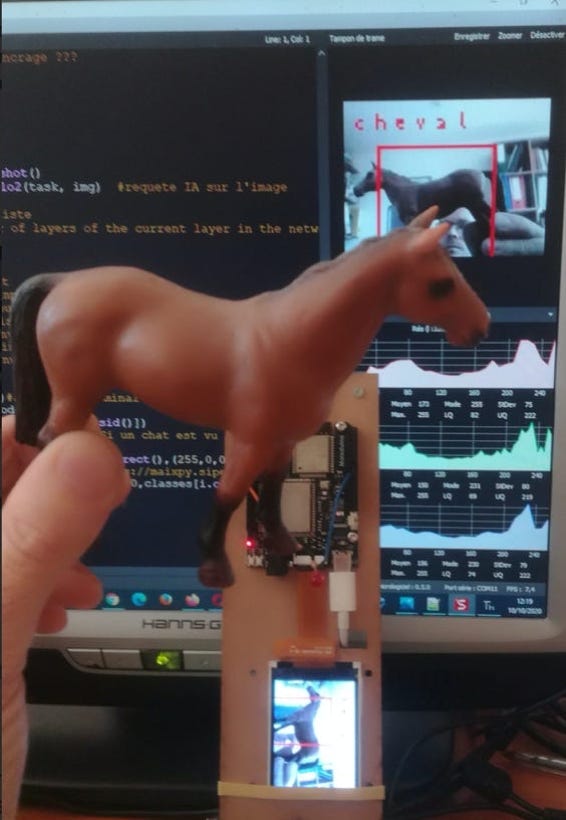
Réalisations possibles:
- WIFI ESP 32 + BlueTooth
-IA reconnaissance de visage, de forme
-IA reconnaissance vocale
-carte compatible ARDUINO au niveau des connecteurs
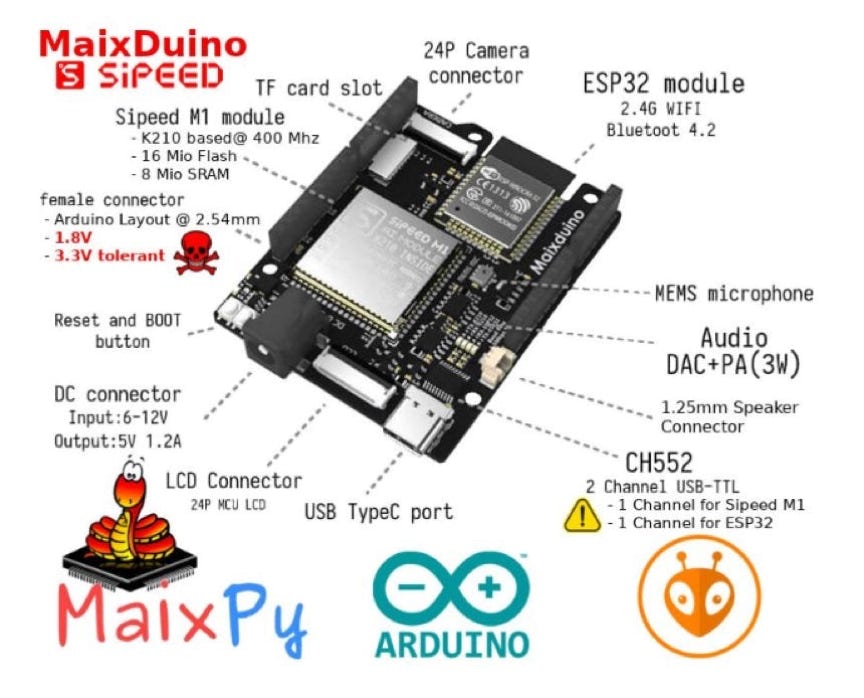
Caractéristiques = connectique voisine de l’Arduino
entrées-sorties numériques :9
entrées analogiques (jusqu’à 5V) avec CAN 12 bits :6
sortie analogique : 0
PWM: sur 8 sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
Communications
port série USB,
bus série avec les bornes RX-TX :1
bus I2C et SPI :1+1
Micro-contrôleurRISC-V Dual Core 64 bits :400 MHz
RAM : 8Mo//16 Mo Flash
Entrée-sortie AUDIO par DAC 16 bits
Langage de programmation :C++ou Micro-Python
WIFI + BlueTooth
Logiciel :IDE Arduino ou MaixPy Python
Camera : QVGA@60FPS/VGA @ 30FPS.
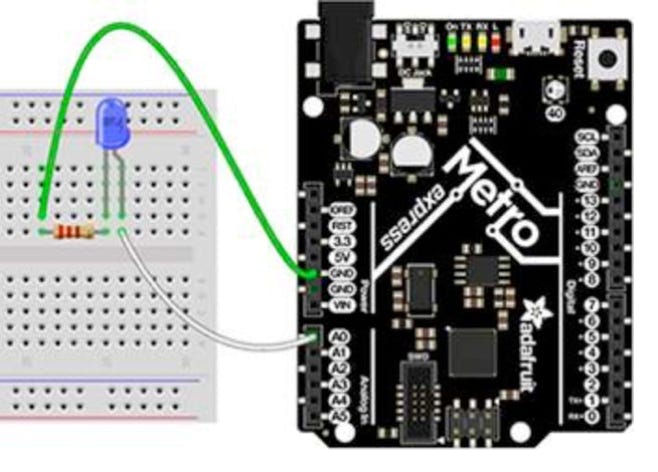
Carte Contrôleur M0ExpressMetro ou Feather
Avantage de programmation : programmation en C++ ou en Micro-Python.
Attention : c’est une version simplifiée de Python 3, donc il ne faut pas penser utiliser les bibliothèques élaborées comme NumPy ou PIL. Egalement, le langage est interprété donc plus lent.
Une VRAIE sortie analogique!
Metro : connectique identique à l’ARDUINO
Format similaire à la carte Arduino pour les deux rangées de connecteurs
Caractéristiques = connectiques voisines de l’Arduino
entrées-sorties numériques : 9
entrées analogiques (jusqu’à 5V) avec CAN 12 bits :6
sortie analogique : 1 sortie 10bits
PWM: sur 8 sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
Communications
port série USB,
bus série avec les bornes RX-TX :1
bus I2C et SPI :1 + 1
Micro-contrôleurARM Cortex Mo:48 MHz
256 Ko de Flash+ 32 Ko de RAM+2 Mo disque fichiers
Langage de programmation :C++ou CircuitPython
Logiciel :IDE Arduinoou IDE Python
Existe une version Metro M4 Express plus rapide.
ATTENTION : CircuitPython est un fork de MicroPython par la société ADAFRUIT, mais s’éloigne du standard volontairement pourenfermer l’utilisateur.
CONNEXIONS ci-dessous:
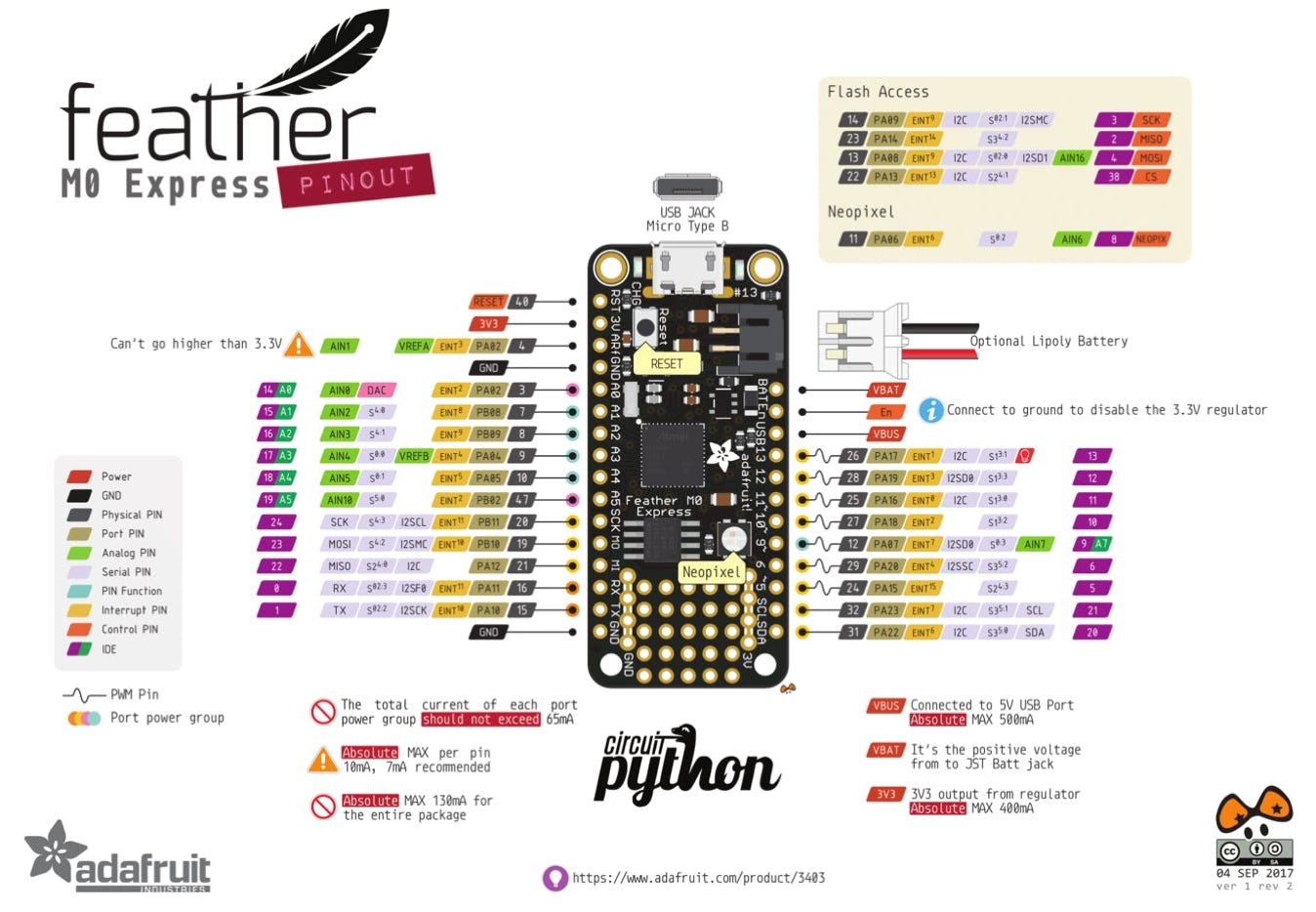
Version miniature (Feather)
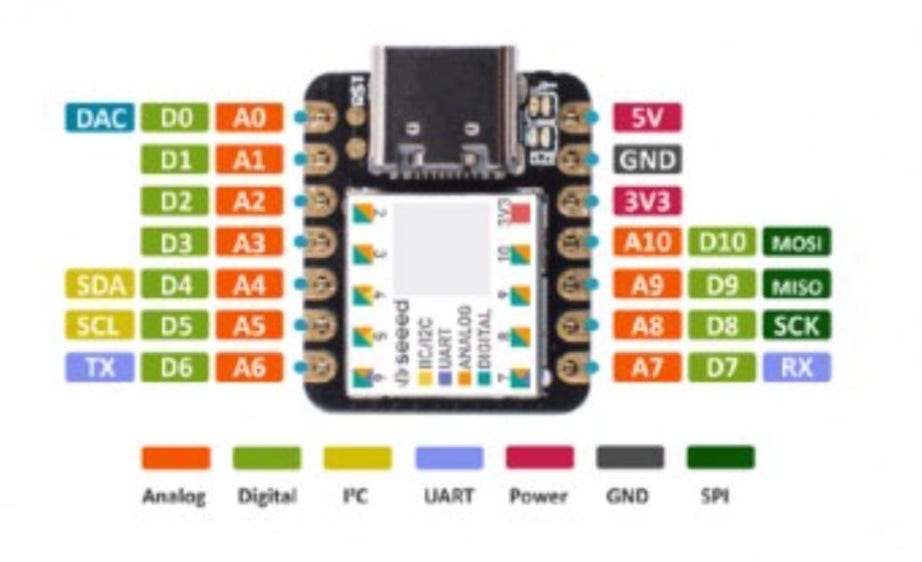
Carte Contrôleur XIAO
Format de carte miniature.
Toutes les bornes sont digitales ou analogiques.
Avantage de programmation : programmation en C++ ou en Circuit-Python.
Attention : c’est une version simplifiée de Python 3, donc il ne faut pas penser utiliser les bibliothèques élaborées comme NumPy ou PIL
Une VRAIE sortie analogique!
XIAO : programmation identique à l’ARDUINO
Et TOUS les connecteurs ont une interruption
INCONVENIENT : langage CircuitPython pas toujours standard
CONNEXIONS ci-dessous:
Caractéristiques :ATTENTION entrée max 3,3V !!!!!!
entrées-sorties numériques : jusqu’à 11
entrées analogiques (jusqu’à 3.3V) avec ADC (CAN) 12 bits :jusqu’à 11
sortie analogique :1 sortie DAC (CNA) sur A0 en 10 bits jusqu’à 3.3V
PWM: sur 10 sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
Communications :
port série USB,
bus série avec les bornes RX-TX :1
bus I2C et SPI :1 + 1
Micro-contrôleurARM Cortex M0:48 MHz
256 Ko Flash+ 32 Ko RAM données
Langage de programmation :C++ouCircuitPython
Logiciel :IDE Arduino,

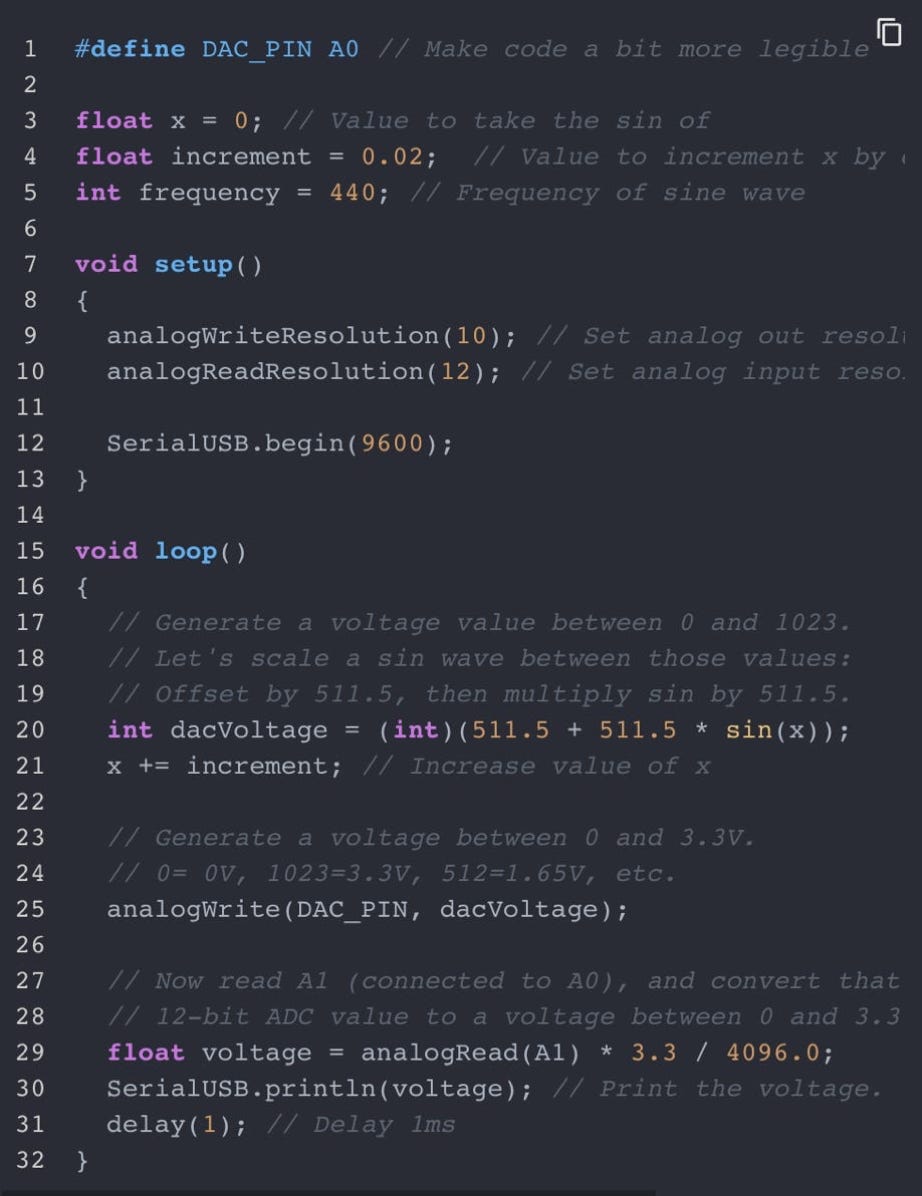
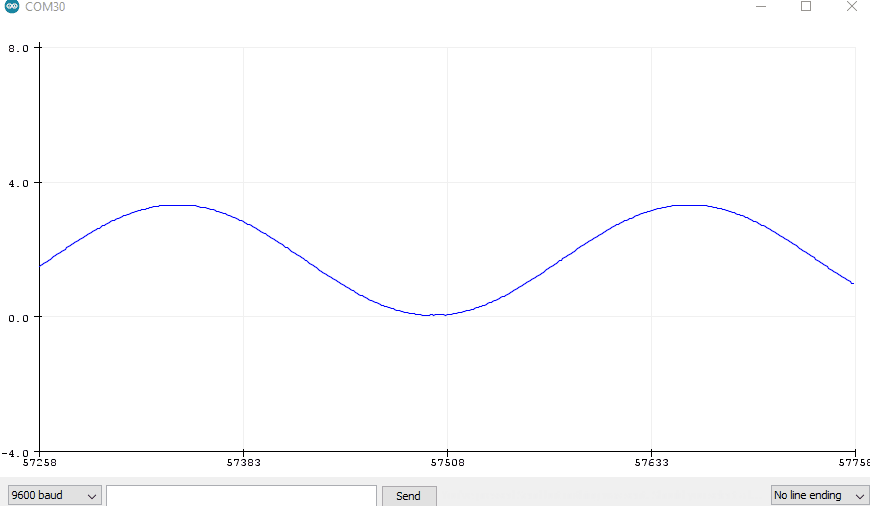
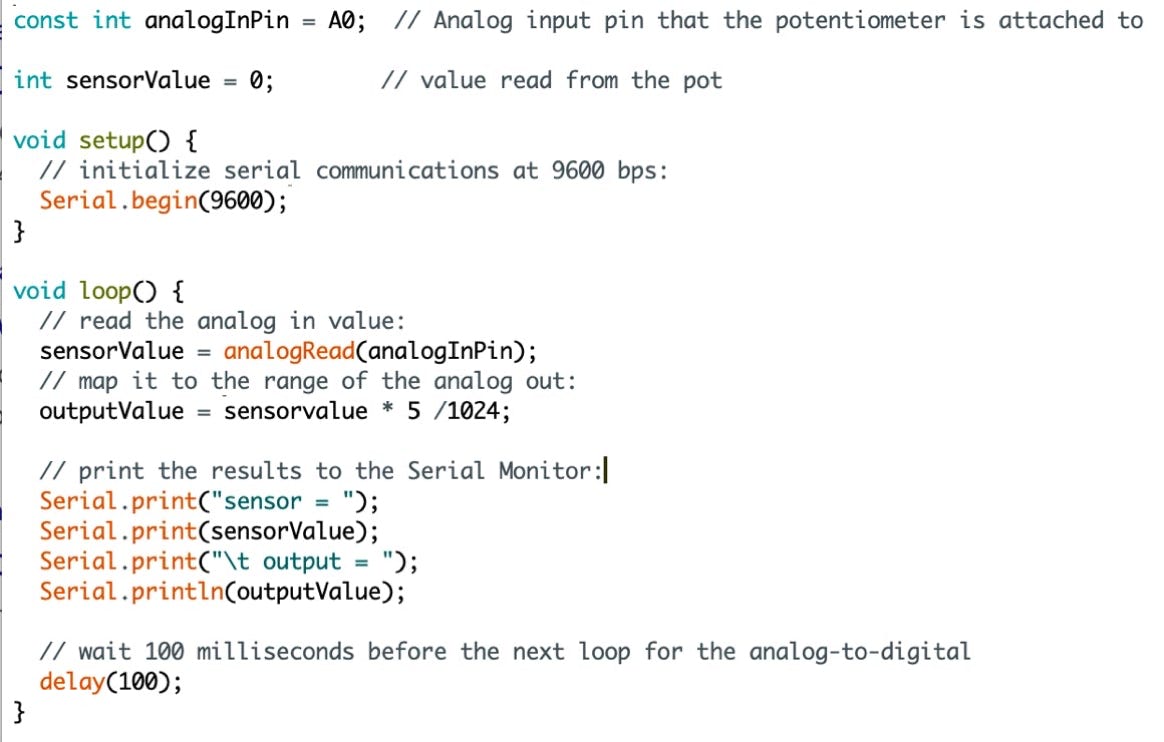
Programme C++ permettant de générer un sinus sur la borne de sortie analogique vraie A0, et de lire les données sur l’entrée analogique A1 avant de les tracer avec le «Traceur série» de l’IDE Arduino
C++versusMicroPython ou CircuitPython
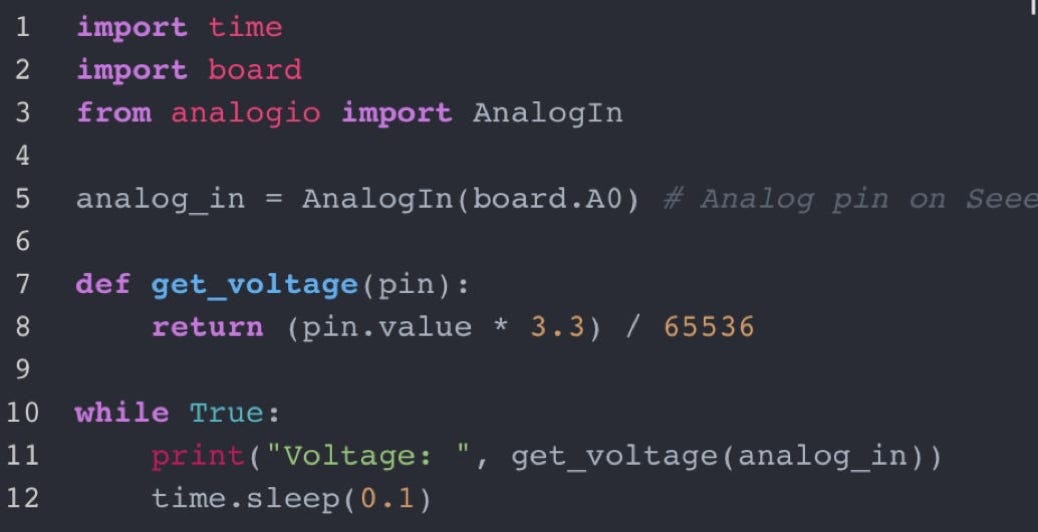
Programme MicroPython permettant de lire une donnée analogique en entrée sur la borneA0 (CAN supposé 16 bits donc 65536 valeurs sur un intervalle ici de 3,3V), et d’écrire les données sur la sortie série.
Avantage de programmation en C++: le programme est compilé donc plus rapide.
Programme C++ permettant de lire une donnée analogique en entrée sur la borneA0 (CAN supposé 10 bits donc 1024 valeurs, sur un intervalle ici de 5V), et d’écrire les données sur la sortie série.
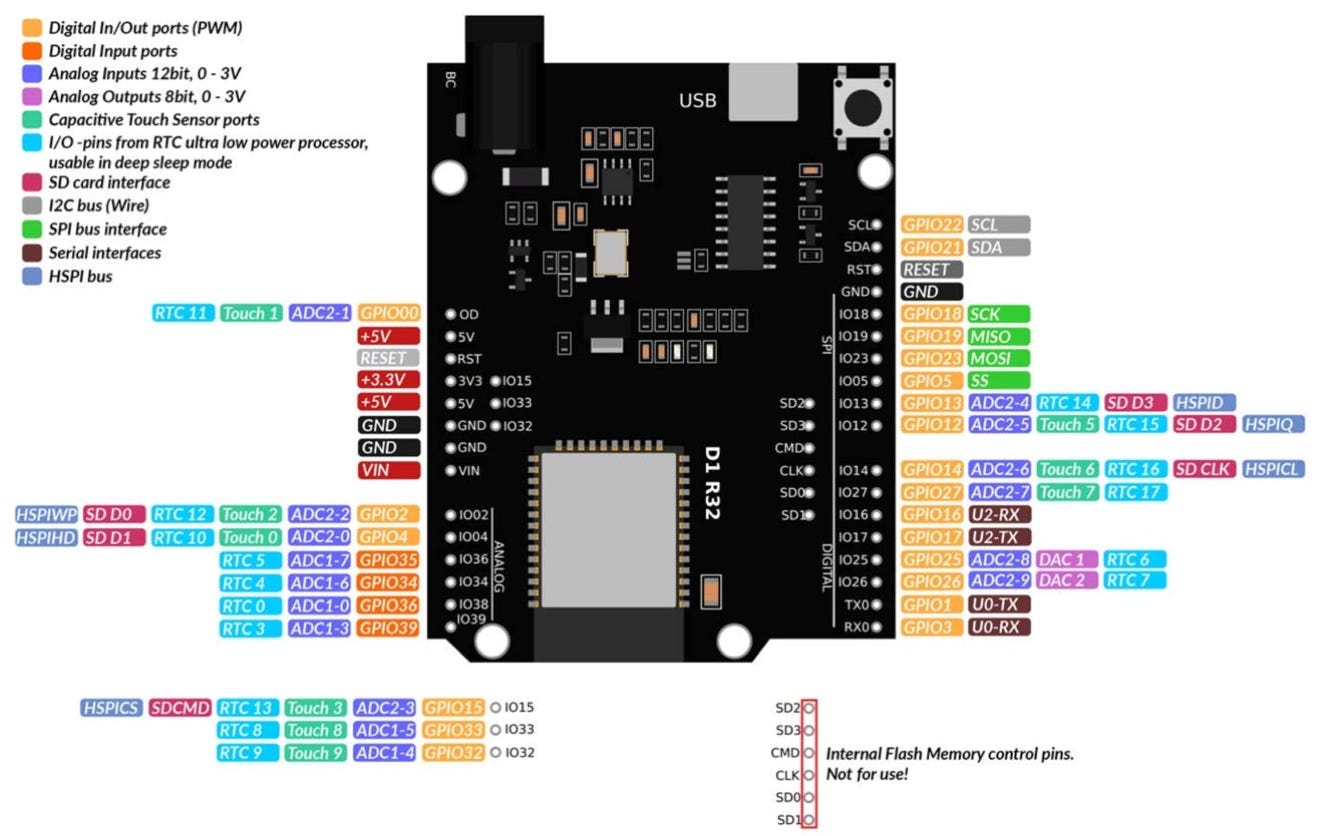
Carte Contrôleur AZ_D ESP32
Format similaire à la carte Arduino pour les deux rangées de connecteurs
Avantage de programmation : programmation en C++ avec l’IDE Arduino
Caractéristiques :ATTENTION entrée max 3,3V !!!!!!
entrées-sorties numériques : jusqu’à 20
entrées analogiques (jusqu’à 3.3V) avec ADC (CAN) 12 bits :jusqu’à 12
sortie analogique :2 (CNA 8 bits)
PWM: sur 16 sorties numériques. Cela permet de simuler des sorties réglables de tension entre 0 et 3.3V.
Programmation identique à l’ARDUINO
Fonctionnalité WIFI + BlueTooth
Communications :
port série USB,
bus série avec les bornes RX-TX :1
bus I2C et SPI :1 + 1
1 capteur à effet Hall sur la carte
CONNEXIONS ci-dessous:
Micro-contrôleur32-bit Tensilica + ESP 32:240 MHz
D1 R32 Wlan
4 Mo FlashFICHIERS et pseudo-code + 512 Ko RAMpour les données
Langage de programmation :C++

{kind=link}
EXEMPLES de MCOT et diaporamas de T I P E
Voilà deux exemples de MCOT + DOT + diaporama réalisés en PSI à Thuillier en 2022

sdfd bleus sqfsf fehfmjq bvvcSite réalisé sur MBProhkqdfks psd qf qfgqshfdhjt thtjt
Sparkle + code HTML 5 pur + Site personnel + Hubic
+ LaTeX (MacTeX) + TiKZ + iMovie + Audacity + Blender
